Электродвигатели с переключаемой индуктивностью для электромобилей
Из-за большого количества обычных автомобилей с двигателями внутреннего сгорания (ДВС), загрязнение окружающей среды и нехватка энергоресурсов стали актуальными проблемами. Электромобили (ЭМ) способны ограничить использование ископаемых источников энергии и являются идеальным решением для экономии ресурсов и создания транспортных средств с нулевыми выбросами.
Ключевой особенностью электромобиля является его электродвигатель, как показано на Рисунке 1, поэтому выбор подходящего двигателя имеет решающее значение. За последние десятилетия было исследовано и проанализировано множество типов электродвигателей для применения в электромобилях. В настоящее время особое внимание в научном сообществе привлекают машины с переключаемой индуктивностью (SRM) благодаря их многочисленным преимуществам. Эти двигатели демонстрируют общую эффективность по сравнению с асинхронными двигателями аналогичной мощности, так как их потери на вращение и трение сопоставимы.
В данной статье представлен SRM, его принцип работы, а также основные преимущества и недостатки. Наконец, будут обсуждены существующие методы управления SRM.
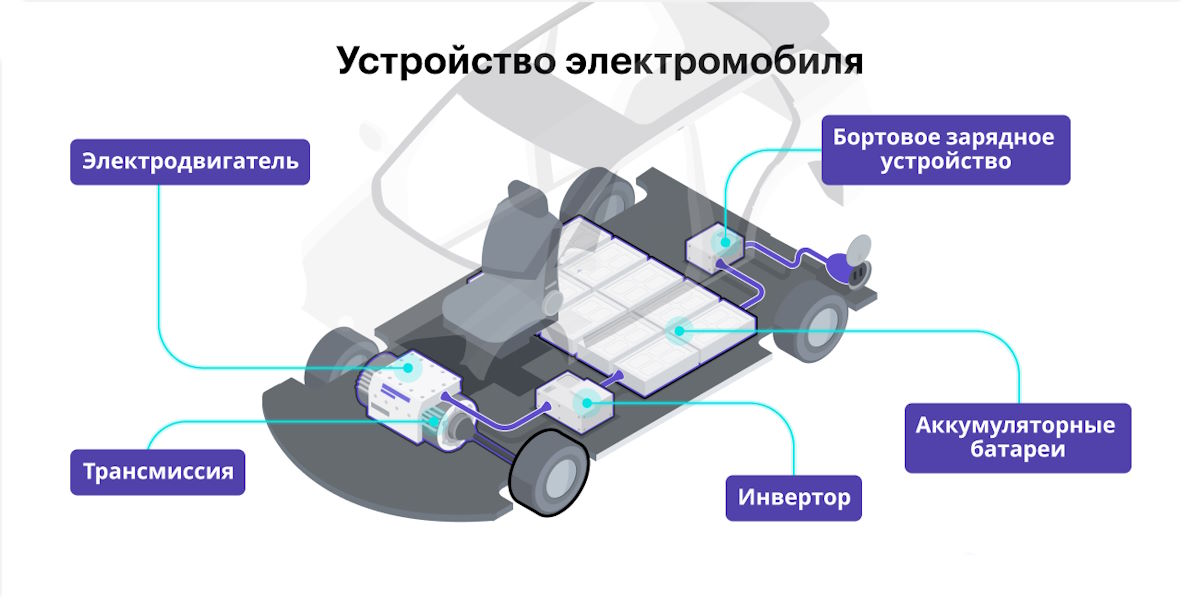
Рисунок 1: Внутренняя структура электромобиля с электродвигателями.
Принцип работы электродвигателя с переключаемой индуктивностью
Электродвигатель с переключаемой индуктивностью создает крутящий момент путем изменения магнитного сопротивления, как показано на Рисунке 2. Его статор имеет выступающие полюса и содержит обмотки, аналогичные обмоткам безщеточного постоянного тока (BLDC), однако ротор выполнен из стали в виде выступающих полюсов без магнитов или обмоток. Питание подается к обмоткам статора, а не к ротору, в отличие от классических коллекторных двигателей постоянного тока. SRM работает за счет переменного тока в обмотках статора, который изменяет магнитное поле как в статоре, так и в роторе. Чтобы избежать ситуации, при которой полюса ротора и статора совпадают и крутящий момент равен нулю, в SRM используется меньшее количество полюсов ротора по сравнению со статором.
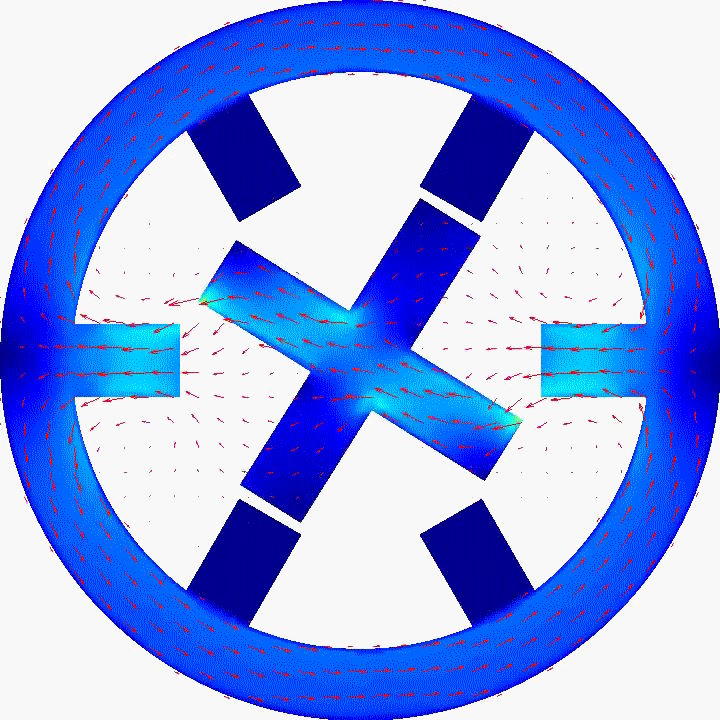
Рисунок 2: Структура электродвигателя с переключаемой индуктивностью.
Магнитный контур между ротором и статором обладает высоким сопротивлением, когда они не совпадают. В этот момент активируются пары полюсов статора, и ротор стремится выровняться с заряженными полюсами статора, что уменьшает магнитное сопротивление. Способность ротора достигать положения минимального сопротивления создает крутящий момент, называемый магнитным (или релуктивным) крутящим моментом. Для точного управления возбуждением полюсов статора необходимо своевременное срабатывание сенсоров Холла или шаговых энкодеров, которые фиксируют положение ротора.
Преимущества и недостатки
Электродвигатели с переключаемой индуктивностью обладают множеством преимуществ по сравнению с другими типами электродвигателей благодаря гибкости управления, простой конструкции, низкой стоимости и высокой эффективности. Отсутствие обмоток или постоянных магнитов на роторе делает SRM подходящими для применения в условиях экстремально высоких скоростей и высоких температур. Кроме того, такие двигатели отличаются прочной и простой конструкцией, а также низкой себестоимостью производства. При этом, если происходит отказ одной из обмоток или фаз, двигатель продолжает работать, хотя и на пониженной нагрузке. Это особенно важно для вентиляторов, насосов и, конечно, электромобилей.
Однако SRM имеют и недостатки. Один из самых значительных — это нелинейные характеристики, вызванные насыщением магнитопровода, что затрудняет точное управление крутящим моментом.
На данный момент для средних и малых электромобилей используются различные типы двигателей с постоянными магнитами, но их стоимость постоянно растет, и они станут слишком дорогими для применения в тяжелых коммерческих автомобилях. В связи с этим SRM, обладая высокой технологичностью и низкой стоимостью, являются перспективным выбором для электромобилей. Использование электромобилей не будет ограничено экстремальными условиями эксплуатации, так как SRM способны работать при высоких температурах.
Ключевыми недостатками SRM являются высокий уровень шума, вибраций и пульсаций крутящего момента. Для их управления требуются более сложные методы по сравнению с другими типами двигателей постоянного и переменного тока. Некоторые из существующих методов управления рассмотрены в следующем разделе.
Методы управления
Электродвигатели с переключаемой индуктивностью страдают от высоких пульсаций крутящего момента из-за дискретного характера выработки крутящего момента и независимости фаз. Это основной недостаток, который может ограничить их применение в электромобилях. Тем не менее, в настоящее время разрабатывается множество стратегий управления для решения этой проблемы. В общем виде существуют два основных метода управления крутящим моментом SRM: прямое управление крутящим моментом и косвенное управление крутящим моментом.
Прямое управление крутящим моментом
Стратегия прямого управления крутящим моментом включает простую систему управления с использованием гистерезисного контроллера. Нелинейные характеристики SRM учитываются для компенсации пульсаций выходного крутящего момента на основе текущих параметров и положения ротора. Основные преимущества метода — это простота, высокая производительность и быстрая реакция на изменение крутящего момента.
В более продвинутых стратегиях используются такие подходы, как ускоренное прямое управление мгновенным крутящим моментом (ADITC) и прямое управление мгновенным крутящим моментом (DITC).
- В методе DITC средний крутящий момент контролируется в пределах заданного диапазона путем оценки мгновенного крутящего момента. Однако точное управление мгновенным крутящим моментом затруднено из-за зависимости от времени выборки.
- В методе ADITC управление осуществляется путем регулировки среднего напряжения фазы в течение одного интервала выборки, что позволяет уменьшить пульсацию крутящего момента за счет увеличения времени выборки. Однако при одинаковом времени выборки частота переключений в ADITC почти вдвое выше по сравнению с DITC, что приводит к увеличению электрромагнитных выбросов и потерь при переключении.
Косвенное управление крутящим моментом
Косвенное управление крутящим моментом делится на три типа: нелинейная функция распределения крутящего момента (TSF), косинусная функция и линейная логическая функция распределения.
- Метод с нелинейной TSF показывает наиболее многообещающие результаты по сравнению с другими. Крутящий момент контролируется путем управления токами фаз, которые, в свою очередь, влияют на магнитный момент.
- Для преобразования заданного магнитного момента в соответствующий токовый параметр требуется сложная математика, так как зависимость между положением ротора, крутящим моментом и током является нелинейной. Для решения этой задачи применяются искусственные нейронные сети либо таблицы значений.
Комментарии
Написать автору